#Robotics
-

Robustifying Model-Based Locomotion by Zero-order Stochastic Nonlinear Model Predictive Control with Guard Saltation Matrix
-
Extrinsic Calibration of Multiple LiDARs for a Mobile Robot based on Floor Plane And Object Segmentation
-
Real-time Perceptive Motion Control using Control Barrier Functions with Analytical Smoothing for Six-Wheeled-Telescopic-Legged Robot Tachyon 3
-
Development of a Compact Robust Passive Transformable Omni-Ball for Enhanced Step-Climbing and Vibration Reduction
-
Versatile Telescopic-Wheeled-Legged Locomotion of Tachyon 3 via Full-Centroidal Nonlinear Model Predictive Control
-
Developments in Nonlinear Model Predictive Control for Telescopic-Wheeled-Legged Robot Tachyon 3
-

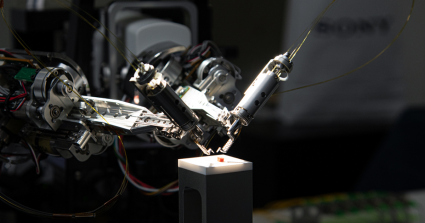
Microsurgery Assistance Robot
-

Working as a Foreigner in Sony R&D – Embracing Opportunities and Overcoming Challenges
-
Tomohiro Kawahara of Sony Group Corporation presented and received the award at the SI2023 with “Design and development of a robot arm with distributed sensors”
-

Self-Supervised Motion Estimation for Event Cameras
-

The nursing robot “HANAMOFLOR” goes on permanent display at the National Museum of Emerging Science and Innovation
-

Robotics Platform
-

New Moblity System
-

Manipulator
-
The precision bilateral control system
-
Soft-Material-Based Highly Reliable Tri-Axis Tactile Thin-Film Sensors for Robotic Manipulation Tasks
-
Tachyon: Design and Control of High Payload, Robust, and Dynamic Quadruped Robot with Series-Parallel Elastic Actuators
-
Policy Blending and Recombination for Multimodal Contact-Rich Tasks
-
Theoretical Derivation and Realization of Adaptive Grasping Based on Rotational Incipient Slip Detection
-
3D-CNN Based Heuristic Guided Task-Space Planner for Faster Motion Planning