ソニーグループ(株)先端研究部の川原 知洋が、第24回計測自動制御学会システムインテグレーション部門講演会 (SI2023)にて「センサが分散配置されたロボットアームの設計と開発」を発表し、優秀講演賞を受賞しました。
ヒトの腕と手のように実環境に介在して作業を行う多自由度のアクチュエーション(駆動)システムは、一般的には自由度が増えるごとに計算量が増大する傾向にあります。特に、システムの周囲の状態が大きく変化する場合、他の物体との衝突などを避けながら作業を続けるためには、計算量が膨大になってしまいリアルタイムで処理することが難しいため、作業自体を続けることが困難になります。そこで、このような課題を解決する一つのアプローチとして、アクチュエーションシステムにセンサを分散配置する方法を提案し、センサ情報を活用することでリアルタイムかつ低計算コストで動作生成を行う方法について検討を行いました。
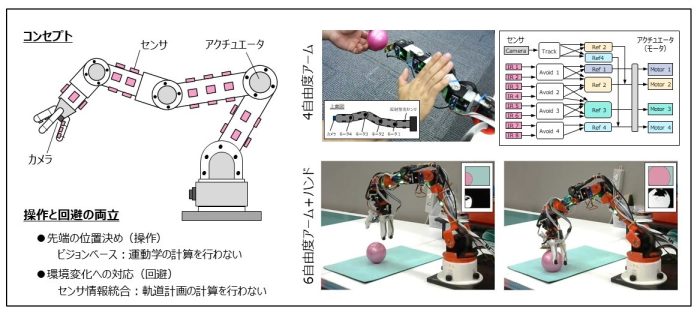
アクチュエーションシステム(例えばロボットアーム・ハンド系)が何らかの作業を行うためには、その手先を対象物に近づける必要があります。その際、一般環境においては作業中に他の物体とぶつかることも考慮する必要があり、この2つをいかに両立させるのかが重要な課題です。今回は、手先を対象物に近づけるための位置決めには、ハンドに取り付けた視覚センサ(カメラ)の視覚誘導を利用し、それに加えて、作業中の他の物体の回避には、分散配置された近接センサからの情報を積極的に利用しており、それらの要素を統合する方法を新たに開発しました。
開発のポイントは、「非常に多くのセンサ信号から各関節のアクチュエータへの動作指令をどのように生成するか」ですが、例えば微生物や昆虫は環境が時々刻々と変化する状況でも優れた適応能力を発揮します。近年では、バイオテクノロジーの技術発展により運動メカニズムや、信号処理経路などが明らかになってきました。そこで我々は、そのような生物の信号処理の仕組みと従来のシステムアーキテクチャを結び付け、センサ信号を統合して並列分散的に処理することで、複雑な計算を行わずにアクチュエーションシステム全体の動作生成を行う方法を検討しています。
以上の点を踏まえ、まずは4自由度で水平駆動するプロトタイプを実際に作製して設計と実装に関する指針を確立し、基本的な動作を確認しました。また、6自由度のアクチュエーションシステムとしてアーム・ハンド系を作製し、多自由度系への拡張可能性を検証するとともに、低い計算コストで適応的な動作が可能であることを確認できました。以上のような発表に対し、SI2023優秀講演賞を受賞しました。
今後はシステム設計の最適化を進めるとともに、特にこれまで実現が難しかった作業への応用を通して性能検証を行う予定です。また、機械学習との統合などを含めた展開も想定して研究を進めています。本件の発表に関して、有識者からのフィードバックを期待しています。